You will need:
- Hand template on paper or card
- Scissors
- Straws
- Tape or Glue
- String
Instructions:
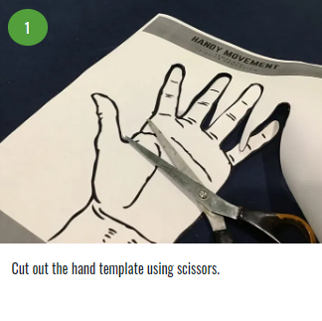


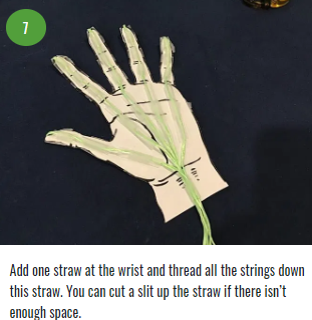
The science in your hands
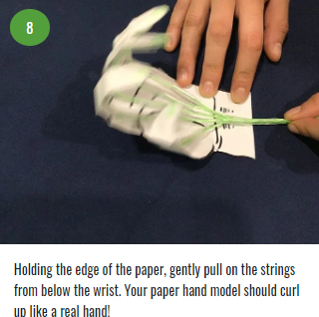
The hand has many bones. The three bones in each finger and two bones in each thumb are called phalanges. The phalanges connect to the metacarpals which are the five bones in the palm of your hand. Altogether, you have 19 bones in each hand plus 8 in your wrist.
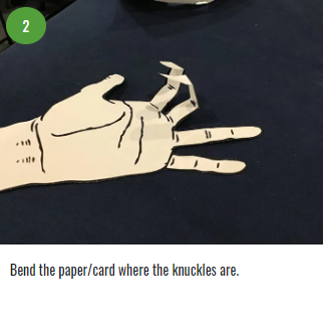
The bones of the hand provide support and flexibility to the soft tissues. They can be divided into three categories:
Carpal bones (Most proximal or closest to arm) – A set of eight irregularly shaped bones. These are located in the wrist area.
Metacarpals – There are five metacarpals, each one related to a digit
Phalanges (Most distal or furthest from arm) – The bones of the fingers. Each finger has three phalanges, except for the thumb, which has two.
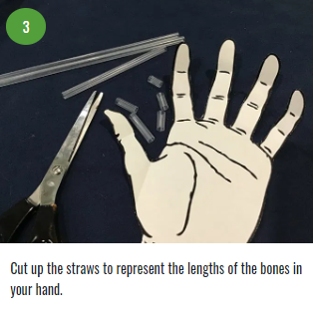
A tendon is a fibrous connective tissue which attaches muscle to bone. Your fingers and thumbs are moved by tendons which are moved by muscles. In most other bones in your body, tendons attach muscles to bone, and then the muscles move the bone. However, your fingers are special because there are no muscles in your fingers. Instead, the muscles that control your fingers are located in your palm and forearm. The muscles move the tendons in your fingers, and it’s the tendons that make your fingers move. The tendons slide through a tendon sheath, which is connected to your finger bones. Look at both sides of your actual hand as you open and close your fingers, and you will see the tendons that are moving your fingers! In this experiment, we used straws to represent the tendon sheaths and twine to represent the tendons.
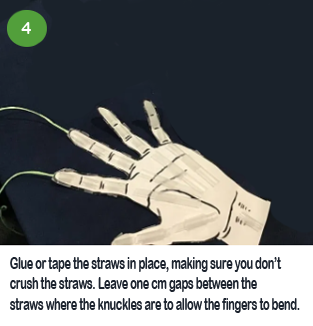
To DO: Variables to test: Can you construct this hand model so that it can hold a weight? What happens if you change the positions of the straws?